
ReHub
ReHub Glove: improve your hands
Elettronica
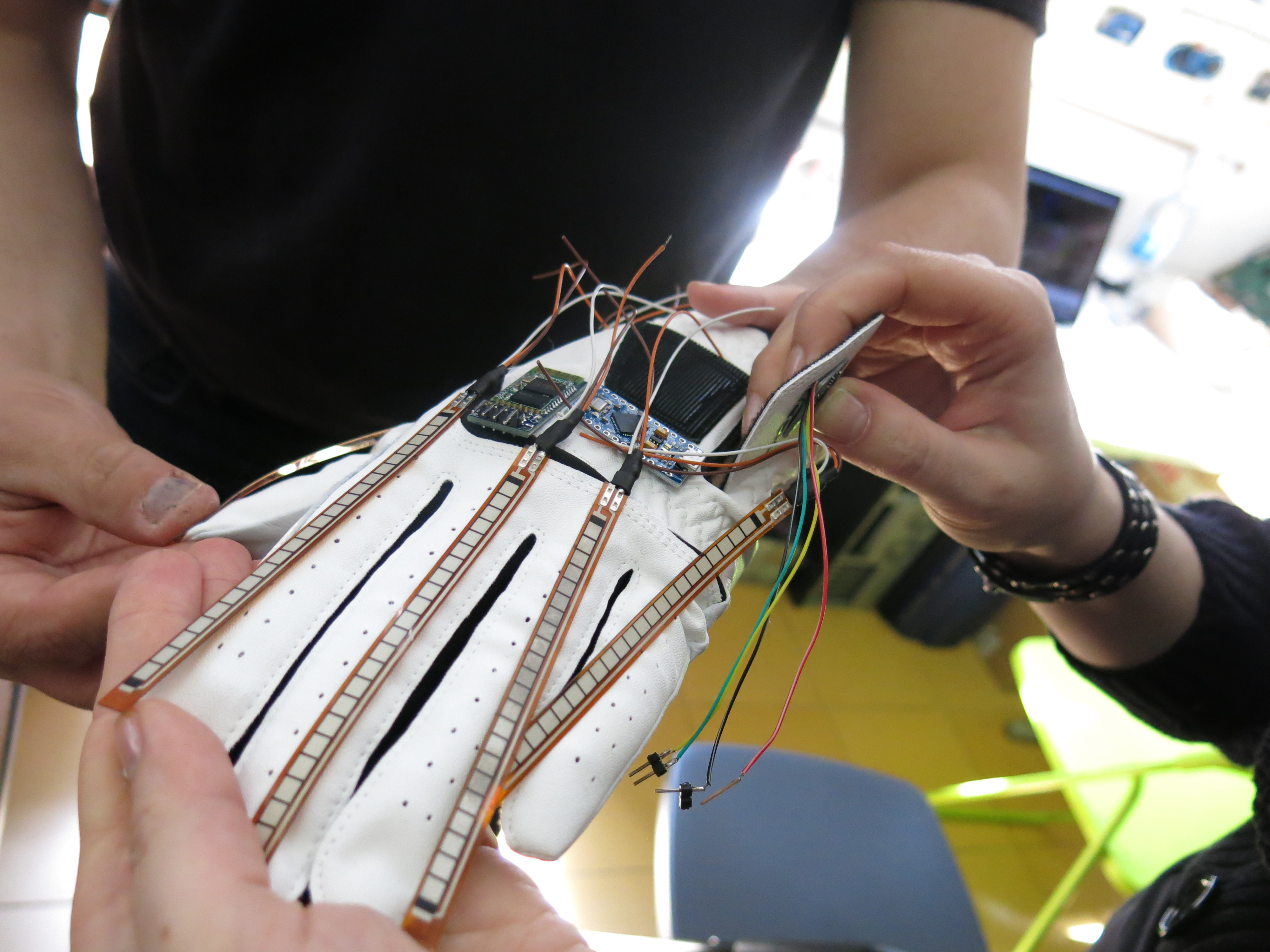

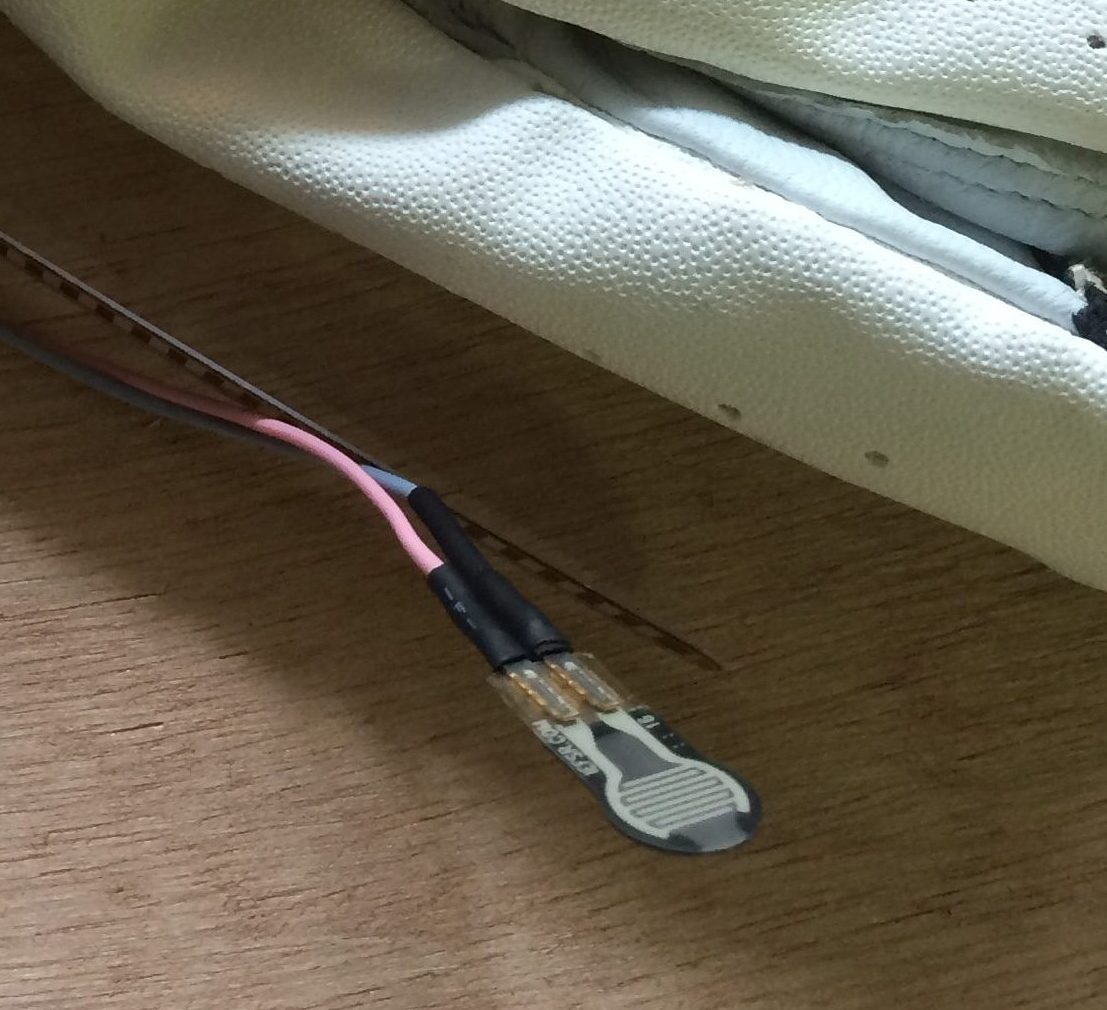
Sensori di flessione
I sensori di flessione permettono al guanto reHub di acquisire le informazioni relative all’angolo di flessione di ciascun dito.
Nel primo prototipo abbiamo utilizzato un sensore di flessione per ciascun dito: cinque sensori della medesima lunghezza per ciascun guanto ci hanno permesso di verificare la fattibilità del progetto ed accorgerci dell’inefficacia di alcuni sensori troppo lunghi applicati a pollice e mignolo.
La lunghezza del sensore superiore alla lunghezza delle dita su cui era applicato causava una escursione limitata dei valori rilevati non riuscendo il dito a flettere tutto il sensore causando un uso solo parziale del lavoro svolto.
Sensori di pressione
Nel primo prototipo abbiamo evitato l’introduzione di questo tipo di sensore lasciando ad un secondo prototipo il test e lo studio e l’analisi dei dati provenienti da ulteriori cinque sensori posti in corrispondenza dei polpastrelli.
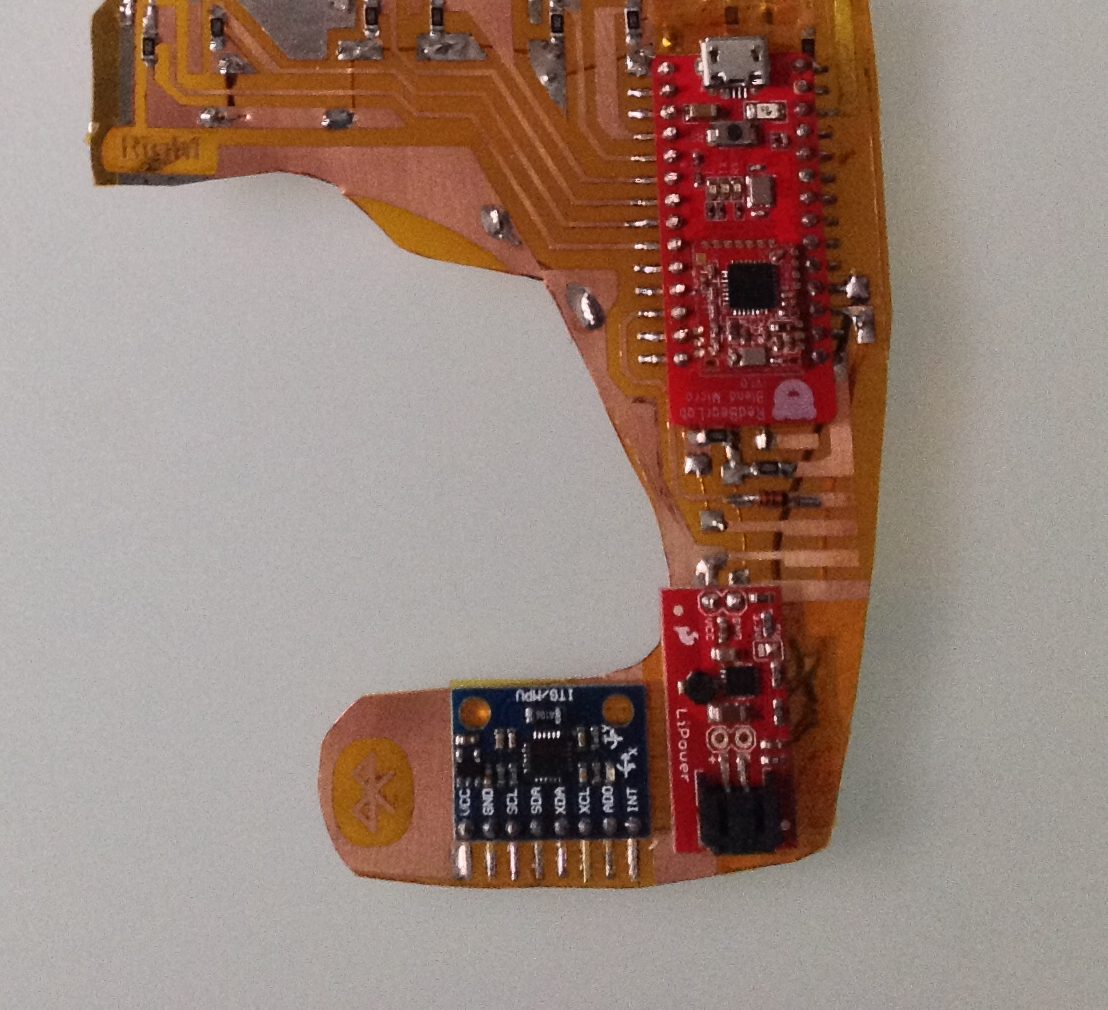
Sensori di posizione 6DOF
La rilevazione della mano nello spazio è stato uno dei principali aspetti di cui lo studio di fattibilità si è occupato. Fin dalle prime valutazioni ci siamo concentrati sulla possibilità di rilevare la posizione della mano mediante accelerometri e giroscopi.