
ReHub
ReHub Glove: sensor hub glove
Electronics
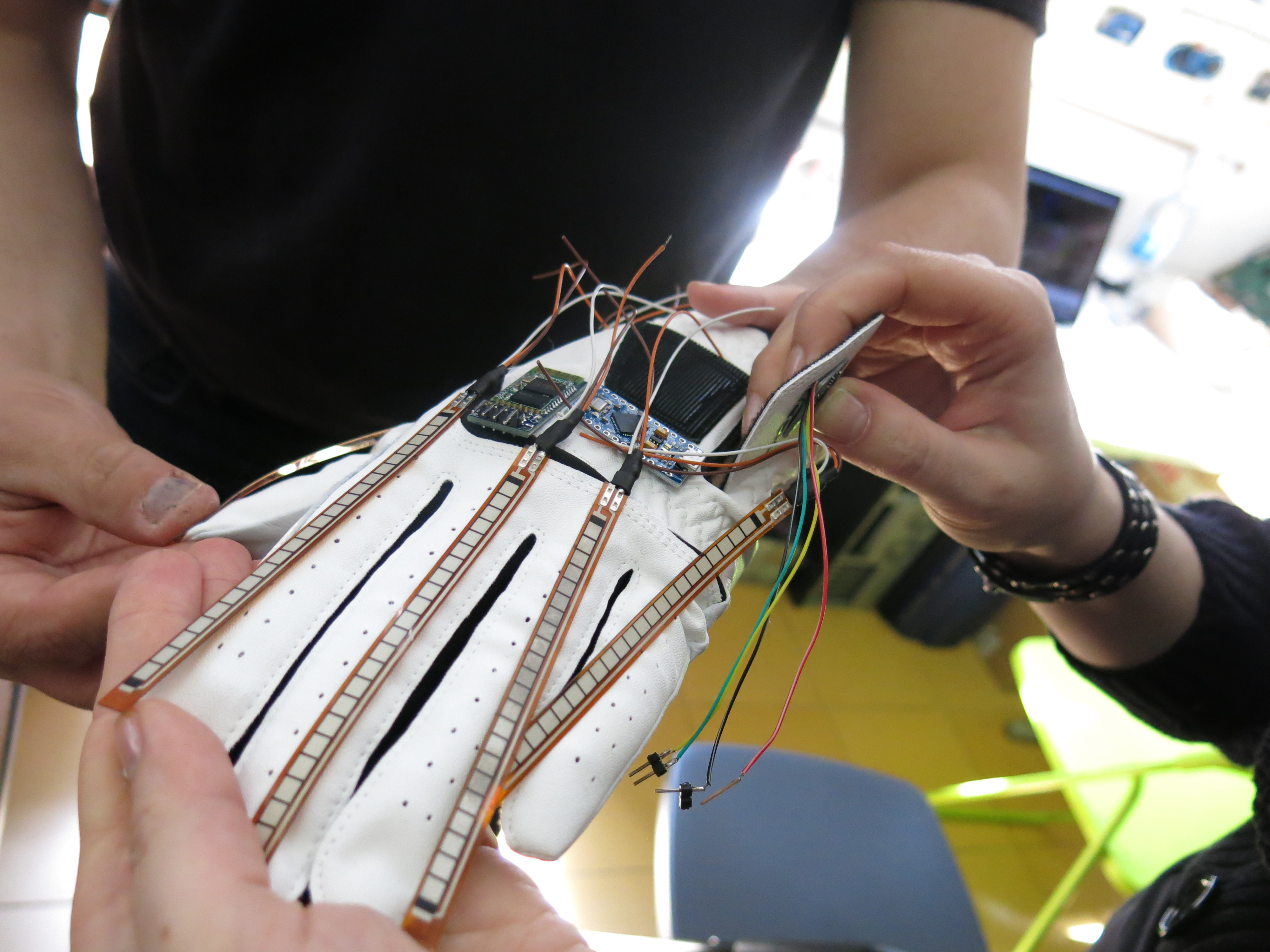

Flex sensors
Flex sensors allow reHub glove to acquire informations related to the corner of each flexed finger.
In reHub’s first prototype we used a bending sensor for each finger: five sensors of the same length, for each glove, allowed us to test the feasibility of the project and realize the ineffectiveness of some sensors.
For example those linked to the thumb and the pinkie were too long.
The use of a longer sensor compared to the related finger caused a limited range of detected values.
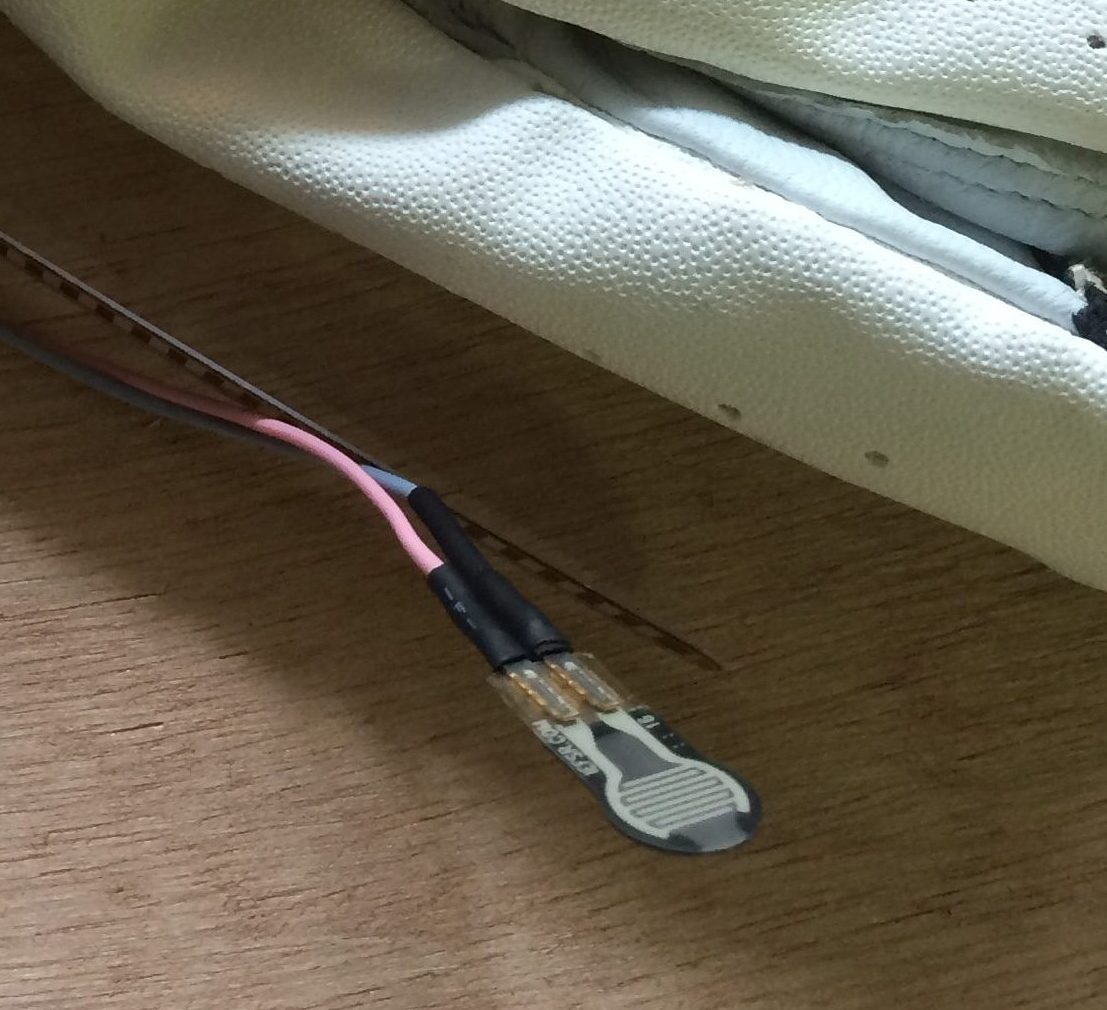
Pressure sensors
In our first prototype we avoided the introduction of this type of sensor leaving to a second prototype testing, study and analysis of data from five additional sensors placed on fingertips.
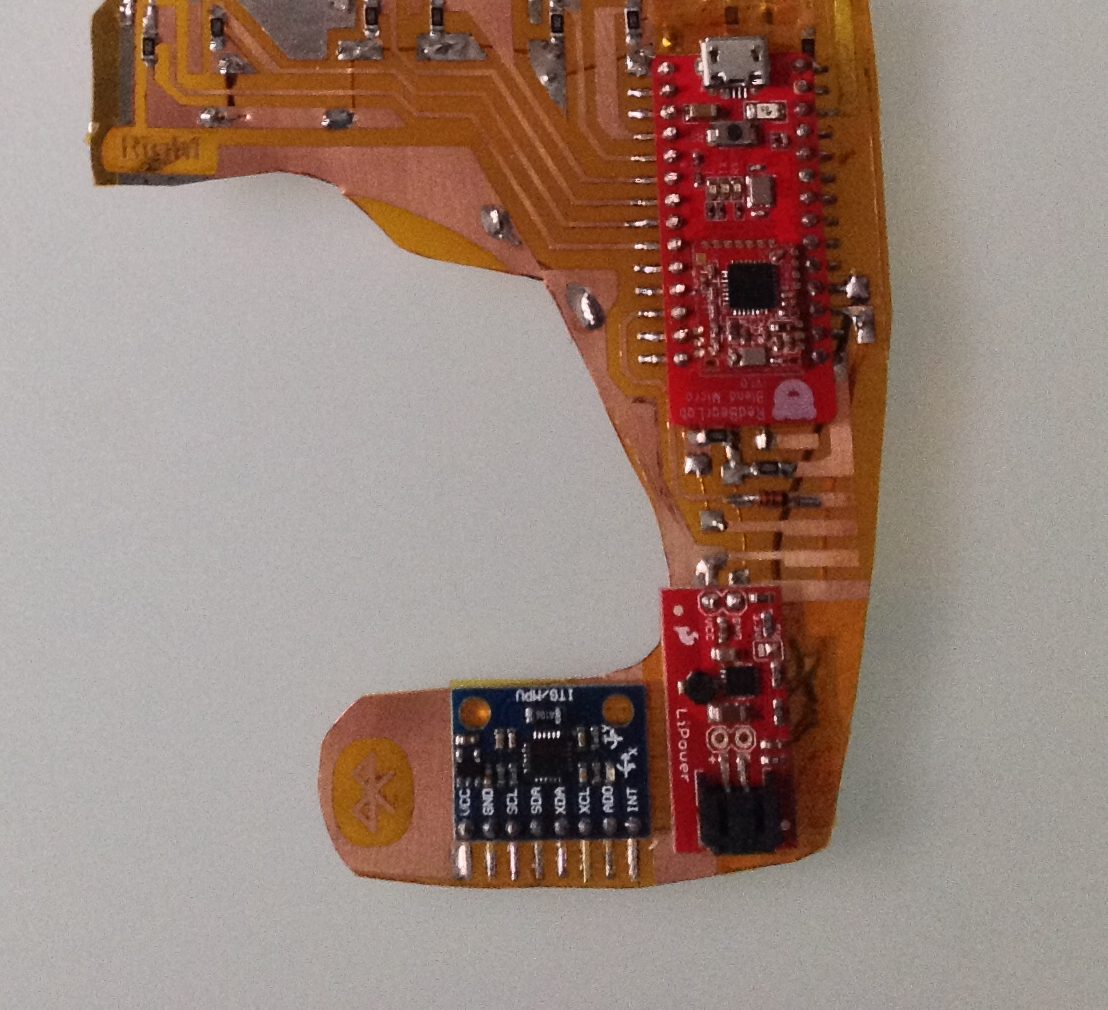
6DOF position sensors
Hand detection in space has been one of the main aspects involved in the feasibility study. Since the first feedback we focused on the possibility to detect the hand position using accelerometers and gyroscopes.